

Bio-inspirierte Strömungshüllen nach dem Vorbild der Natur erhöhen Effizienz, Stabilität und Wendigkeit kompakter Unterwasserroboter – ausgezeichnet mit dem Bremer 3D-Ideen Award.
Kompakte Unterwasserrobotiksysteme werden in der Praxis häufig als sogenannte ROVs (Remote Operated Vehicles) eingesetzt. Diese Systeme sind meist in offener Rahmenbauweise konstruiert, bei der einzelne Komponenten frei montiert werden. Obwohl diese Konstruktion technisch robust und wartungsfreundlich ist, weist sie deutliche strömungsmechanische Nachteile auf: Hoher Widerstand, instabile Lage im Wasser und ein erhöhter Energiebedarf begrenzen Reichweite, Manövrierfähigkeit und Einsatzdauer erheblich.
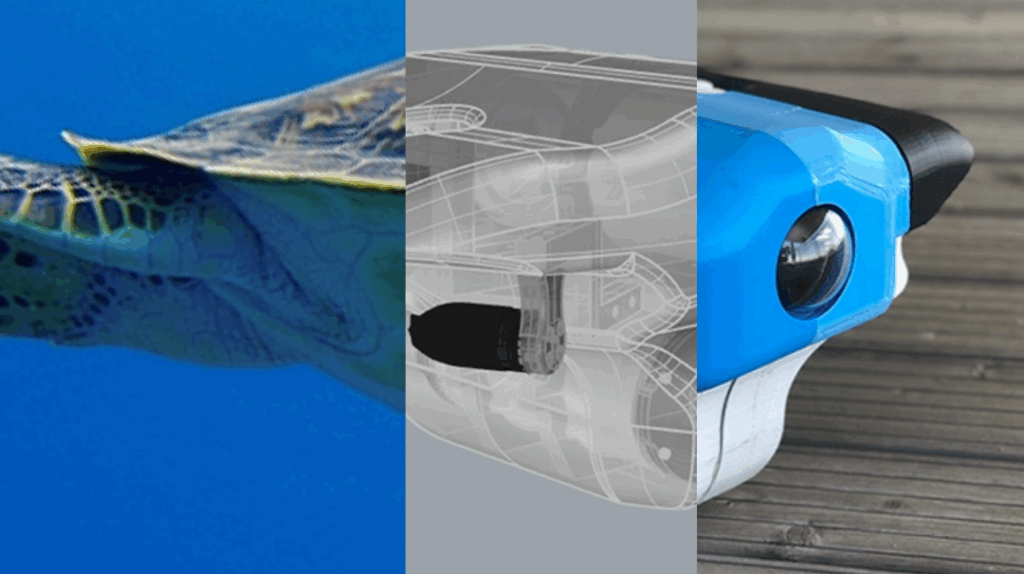
ROV-Modell sibiu nano von Nido Robotics im Original und als 3D-gedrucktes Modell (links, in schwarz), das als Referenz zu den bionisch entwickelten Modellen verwendet wird.
Genau hier setzt die Forschung am Bionik-Innovations-Centrum (B-I-C) seit mehreren Jahren an. Ziel ist die bio-inspirierte Optimierung strömungsgünstiger ROV-Hüllen anhand natürlicher Vorbilder. Als technische Ausgangsbasis diente das OpenROV – ein kompaktes µROV mit drei Thrustern, Kamera und LED-Beleuchtung bei Abmessungen von 30 × 20 × 15 cm und einem Gewicht von 2,6 kg.
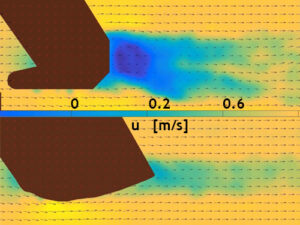
Auf Grundlage biologischer Vorbilder, insbesondere der Schildkröte, wurde im Rahmen einer Masterarbeit ein strömungsoptimiertes Hüllenkonzept entwickelt und anschließend am B-I-C weiter professionalisiert. Die Optimierung erfolgte unter anderem mittels PIV-Strömungsanalysen. So entstanden sowohl besonders lage- und neigungsstabile als auch hochwendige Varianten des sogenannten „TurtleROV“.
Die entwickelten Hüllendesigns konnten auch die Jury des Bremer 3D-Ideen Awards 2022 (Bre3D-Awards) in der Kategorie „Innovative bionische Gestaltung und Design“ überzeugen.
Das prämierte Projekt „Optimierung von Unterwasser-Robotiksystemen mittels 3D-Druck und Bionik“ des Hochschul-Teams adressiert gleich mehrere innovative wie herausfordernde Aspekte, die nach biologischem Vorbild umgesetzt wurden. Dabei standen Ressourceneffizienz und Anpassungsfähigkeit des robotischen Systems im Fokus. So etwa die Minimierung des Strömungswiderstands (= Energieverbrauch) und die Maximierung der Einsatztauglichkeit. Hierbei wurden neben optimierten Hüllendesigns zudem variable Werkstoffe als auch strömungsbegünstigende Mikrostrukturen auf der Hüllenoberfläche während des 3D-Drucks berücksichtigt.
Prof. Dr. Antonia Kesel
Dipl.-Ing. (FH) Florian Hoffmann
Studierende des Masterstudiengangs Bionik: Mobile Systeme