In der wissenschaftlichen Abschlussarbeit, der Master-Thesis, zeigt die:der Studierende ihre:seine Fähigkeit, ein wissenschaftliches Thema der Bionik auf Master-adäquatem Niveau zu erarbeiten. Dies geschieht neben dem Selbststudium auch in Beratungsgesprächen mit der:dem Prüfenden und in den regelmäßig stattfinden den Seminaren mit dem:r betreuenden Professor:in, in dem die Studierenden ihre gewählte Methodik sowie den Bearbeitungsstand jeweils referieren und kommentieren. Das Seminar soll eine geordnete Bearbeitung und gezielte Betreuung ermöglichen.
Da die Thesis auch außerhalb der Hochschule durchgeführt werden kann, können hier zusätzlich Auslandskompetenzen erworben werden (Stichwort „Mobilitätsfenster“).
Im Folgenden sind ein paar Beispiele zusammengefasst:
Abschlussarbeit im Master Bionik: Mobile Systeme an der Hochschule Bremen
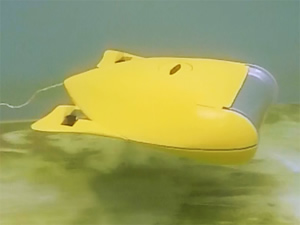
Abb.: D. Appel
Der Unterwasserroboter OpenROV ist mit externer Steuerung und Datenversorgung ausgestattet, trägt aber eine integrierte Batterie. Das macht eine energieeffiziente Optimierung notwendig. Ziel der Arbeit war, die Außenhülle nach biologischen Vorbildern strömungsgünstig zu optimieren. OpenROV ist ein Open-Source Produkt. U.a. die CAD-Daten sind frei zugänglich.
Abschlussarbeit im Master Bionik: Mobile Systeme an der Hochschule Bremen
Der Unterwasserroboter OpenROV ist mit externer Steuerung und Datenversorgung ausgestattet, trägt aber eine integrierte Batterie. Das macht eine energieeffiziente Optimierung notwendig. Ziel der Arbeit war, die Außenhülle nach biologischen Vorbildern strömungsgünstig zu optimieren. OpenROV ist ein Open-Source Produkt. U.a. die CAD-Daten sind frei zugänglich.
Ergebnisse:
Quelle: Appel, D. (2007): Entwurf und Konstruktion einer biologisch inspirierten Strömungshülle für das OpenROV. Masterarbeit, Masterstudiengang Bionik: Mobile Systeme, Hochschule Bremen, unpubliziert.
TurtelROV – Filmische Dokumentation der Masterarbeit von Dominik Appel auf Youtube.