Das Masterprogramm Bionik: Mobile Systeme ist ein forschungsorientiertes, interdisziplinäres Studium biologischer wie ingenieurwissenschaftlicher Inhalte. Teambasierte Projektarbeiten oder Exkursionen gehören zu den praktischen Anteilen im Studieninhalt.
Nachstehend finden Sie ein Projektbeispiel:
Projektarbeit aus dem Jahr 2019 des 2. Semesters des Masterprogrammes von Kira Bredenberg, Christoph Bruns, Dominic Janczyk, Michael Unterreiner & Christoph Wilms
Abb.: Projektgruppe (Namen siehe oben)
Die Lagestabilität ferngesteuerter Unterwasserfahrzeuge (ROV – remotely operated underwater vehicle) ist wichtig, da sie z.B. für die Observation und Dokumentation ihrer Umgebung eingesetzt werden. Studierende haben die strömungsmechanischen Eigenschaften zweier Modelle – mit bionischer Optimierung und ohne – mit Hilfe von CFD (Computational Fluid Dynamics) simuliert und verglichen.
Kira Bredenberg, Christoph Bruns, Dominic Janczyk, Michael Unterreiner, Christoph Wilms (2019):
Projektarbeit aus dem Jahr 2019 des 2. Semesters des Masterprogrammes
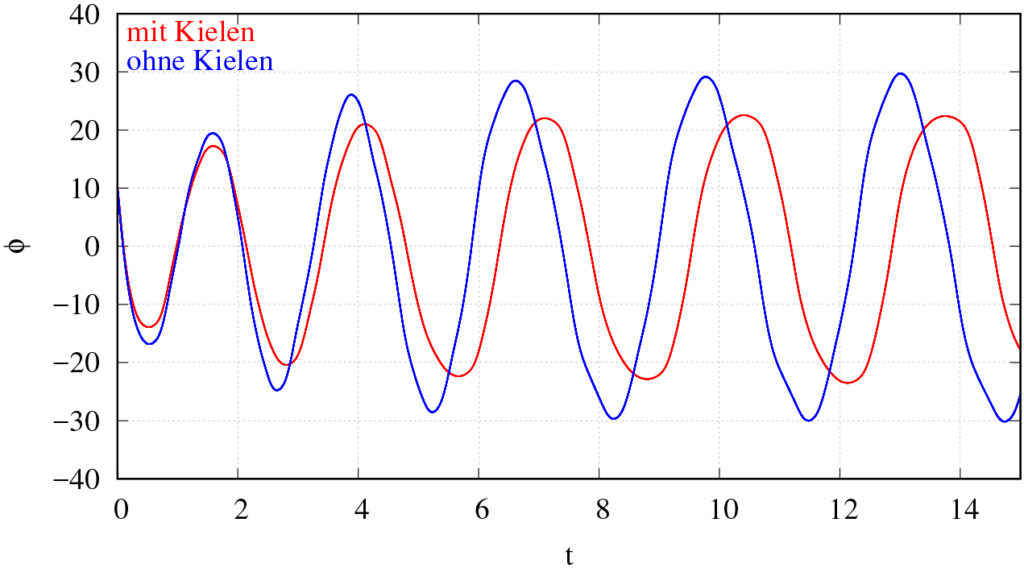
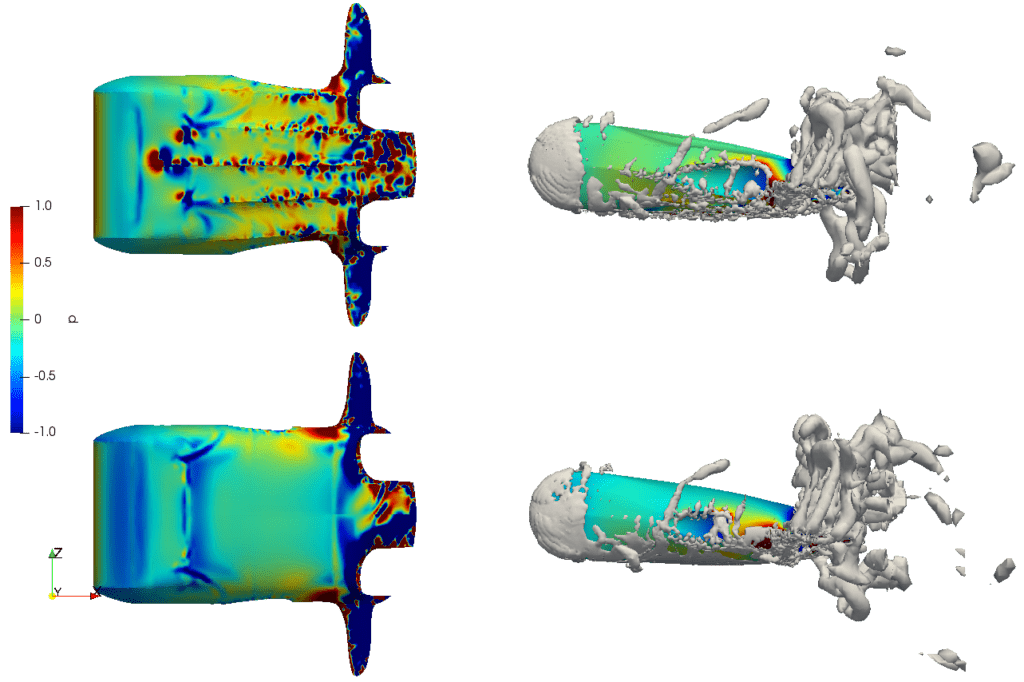
In Projekt mit dem Titel „SOFORT — Shape Optimization For OpenROV exploraTion“ wurden die strömungsmechanischen Eigenschaften zweier ROV-Modelle mit Hilfe von CFD (Computational Fluid Dynamics) simuliert. Verglichen wurden die ROV-Modelle bezüglich ihrer Lagestabilität bei Re = (u/L)/ν = 30000 mit u als Anströmgeschwindigkeit, L als Länge und ν als kinematische Viskosität. Ein Modell (in der Abbildung oben) weißt Längskielen nach Vorbild der Lederschildkröte (Dermochelys coriacea) auf, welche beim unteren Referenzmodell (unten) weggelassen wurden. Für die Simulation wurden beide Modelle auf einer Achse vor dem Massenschwerpunkt gelagert, sodass ein Neigbewegung möglich ist und wurden zu Beginn der Simulation um 10° ausgelenkt. Anschließend pendeln die Modelle in der Strömung aufgrund der Fluid-Struktur-Wechselwirkung. Das Modell mit Längskielen zeigte über die Zeit einen geringen Neigwinkel wie im Graphen zu erkennen ist. Das Druckfeld auf der Oberfläche des ROVs in Kombination mit der Wirbelstruktur (visualisiert mit dem Q-Kriterium (Q=1)) zeigt, dass sich durch die Längskielen deutlich mehr und feinere Wirbelstrukturen ausbilden. Diese dissipieren die kinetische Energie der Neigbewegung und verringern somit den Auslenkungswinkel.
Abb. Projektgruppe (Namen siehe oben)